
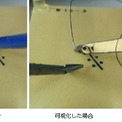
早稲田大学は2014年4月3日、理工学術院の藤江正克教授、小林洋研究員准教授らが、九州大学先端医工学診療部、九州大学病院小児科と共同で、内視鏡手術の際に鉗子の死角となる領域を可視化する技術を開発したと発表した。(写真は、今回の開発技術による可視化のイメージ。提供:早稲田大学)
開発した技術は、手術中に内視鏡カメラとは別のもう1台のカメラを挿入し、鉗子の下側から術部を撮影することで、その映像を上側の内視鏡カメラで撮影したかのように補正して鉗子に投影し、鉗子部分がまるで透けたようになり、隠れていた術部が見えるようになるもの。これまでの内視鏡手術では、手術器具自体により手元が見づらくなることで手術の難易度が上がってしまう問題に効果がある。特に小児外科手術のように、非常に狭小な空間で手術を実施する際にその利用が見込まれるとしている。
近年、外科治療の低侵襲化の期待を受け、各外科領域において内視鏡下手術の普及が進んでいるが、一方で、合併症発生率が高い手技も依然多く存在している。その理由として、操作空間および視野の狭さにより手術器具によって術野が大きく遮蔽されることが原因とされている。
今回の開発は、画像処理により遮蔽領域の画像を手術器具に重畳することで、手術器具が透明になったかのような拡張現実感を実現する視覚補償をコンセプトにシステムが開発された。提案手法では、従来からある医師の視野となる内視鏡に加えて、術具の下側から遮蔽領域を撮影する補償用の立体内視鏡を使用する。補償用の内視鏡で計測した形状をもとに同内視鏡で撮影した画像を変形し、医師の視野となる内視鏡内で遮蔽されている領域を再現する。
製品化されている内視鏡や器具等をそのまま利用できるため、早期の実用化が可能。手術中に故障しないような頑強なシステムとすること、手術中の照明条件などに作用されない頑強なシステムとすることなどが今後の課題になる。早稲田大学では、「今後、パートナーとなる企業を見つけ、早期実用化を目指します」としている。(編集担当:八木大洋)

コメント