

パナソニック コネクト株式会社(本社:東京都中央区、代表取締役 執行役員 プレジデント・CEO:樋口 泰行、以下、パナソニック コネクト)と中央大学理工学部の梅田 和昇教授が率いる研究チームは、2023年10月1日から5日に米国ミシガン州で開催された電気・情報工学分野で世界最大規模の学術研究団体IEEE(注1)における「IROS 2023/IEEE/RSJ International Conference on Intelligent Robots and Systems」にて“Vision-Based In-Hand Manipulation of Variously Shaped Objects via Contact Point Prediction”のタイトルで、ロボットハンド制御技術についての共同研究の成果を発表しました。また、2023年9月11日から14日に仙台で開催された「第41回ロボット学会学術講演会」においても、“接触点の予測に基づく画像を用いたIn-Hand Manipulation”(注2)を発表しました。この成果は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の助成事業の結果得られたものです。
■ロボットハンドによるインハンドマニピュレーションの課題
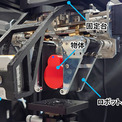
近年、ロボットによる作業自動化が加速する中で、ロボットに求められる動作も高度化しています。ロボットハンドによる高度な動作の一つとして注目されているのが、インハンドマニピュレーションです。インハンドマニピュレーションとは、ロボットハンドで把持した対象物の位置や姿勢をハンド内で変更する動作を指します。インハンドマニピュレーションをスムーズに行うために、表面にコンベアベルトを巻いた複数のフィンガで構成されるロボットハンドが多く研究されています。フィンガ同士で対象物を把持し、その状態でベルトを動かすことで、対象物の並進と回転が可能となります。この機構を使用することで、対象物の位置姿勢変更が可能な範囲の拡大を図ることができます。しかし、特に姿勢変更のために対象物をハンド内で回転させる際、対象物の形状や姿勢によっては、掴み続けることができずにハンドから落下させてしまうという課題がありました。
■インハンドマニピュレーション技術
この課題に対して、パナソニック コネクトでは、ロボットビジョン技術(注3)を活かし、対象物の形状や姿勢に応じてフィンガとベルトを制御するシステムを開発しました。対象物を落とさずに把持するためには、対象物の表面とロボットハンドとが接触しつづける必要があります。接触を維持するためには、対象物の形状や回転中の姿勢に合わせてフィンガ同士の幅を調節する必要があります。しかし、フィンガが必要な幅の分だけ開閉しない状況もあり、その場合に対象物を掴み続けられなくなります。そこで、この状況を引き起こす2つの原因に対してアプローチする手法を開発しました。
注1:Institute of Electrical and Electronics Engineers
世界最大規模の電気・電子・情報工学分野の国際学会 URL:https://www.ieee.org/
注2:ハンドの中で物体の位置や姿勢を変化させる操作のこと。
注3:ロボットを制御するための視覚機能。
全文は以下プレスリリースをご覧ください。
▼[プレスリリース]パナソニック コネクトと中央大学、つかんだものを落とさずに回し続けられるロボットハンド制御技術を開発(2023年10月19日)
https://news.panasonic.com/jp/press/jn231019-1
<関連情報>
・動画掲載ページ
https://connect.panasonic.com/jp-ja/about/who-we-are/research/robot-ihm
・Institute of Electrical and Electronics Engineers 世界最大規模の電気・電子・情報工学分野の国際学会
・中央大学
https://connect.panasonic.com/jp-ja/about/sustainability/dei/lgbtq
https://connect.panasonic.com/jp-ja/about/who-we-are/research
https://connect.panasonic.com/jp-ja/newsroom
配信元企業:パナソニックグループ

コメント