

point
- 4Dプリント技術で複雑な変形を可能にする方法を開発
- 実験に用いる樹脂シートの設計図は完成予想図から時を遡って自動算出された
- 材料に液体金属を使うことも可能であり、二足歩行する液体金属ロボットの基礎理論になりうる
4Dプリントとは、「時間によって変形する素材」を3Dプリントで作る技術です。
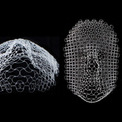
従来の4Dプリント技術では、形状記憶素材のような複雑な変化は困難でしたが、今回人の顔のような複雑な起伏に変形できる方法が開発されました。
この技術が進展すれば、陸上では球の形、水中では魚の形、空中ではグライダーの形をとるトランスフォーマーのような変形ロボットへの道がひらけるだけでなく、元の形状がシート状なため、輸送コストも軽減できるでしょう。
Shape-shifting structured lattices via multimaterial 4D printing
https://www.pnas.org/content/116/42/20856
https://www.pnas.org/content/116/42/20856
時間を遡るマテリアルプログラミング技術

研究を行ったMITの機械技術者Wim van Rees氏は、熱によって膨張する樹脂のメッシュの密度を、調節しながら重ね、特定温度で自動変形するシートを作りました。
この3Dプリントで作られたシートは、熱的な条件に応じて自律的な変形を時間軸の中でサイクルとして繰り返します。その定形パターンは時間軸上を進んでも、光の波長のように繰り返されるのです。
この条件の復元により、あたかも物理現象のように、一定スパンで同じサイクル運動が3次元空間で繰り返されることから、研究者たちはこのプリント技術に通常の3次元に時間の1次元を足した、4次元(4D)プリントと呼ぶようになりました。
今回の複雑な4Dプリントを可能にした核心技術は、マテリアルプログラミング(素材プラグラム)と言われる、シミュレーションを用いた設計法です。
通常の設計シミュレーションが行われる場合、初期状態から完成形に向かうのが一般的です。しかし今回の研究では、先に完成形の予測データを作成し、そのあと最適な初期状態を知るため時間を逆行するシミュレーションが行われました。
結果は成功で、逆設計により3Dプリントに必要な樹脂の密度の初期情報が算出されました。
逆設計は、コンピューターの演算能力が飛躍的に伸びた現代だからこそ可能となった手段といえます。
変形の基礎理論はガウスが作っていた

今回の実験で最も難しかった点は、変形の結果、シートの表面にヒビがはいったり、裏に消えないシワが産まれるのをを避けることでした。
トランスフォーマーのように、条件によってシームレスに変形するロボットの素材になるには、数回の変形でシートに不可逆的な傷ができるようでは不適切です。
そこで研究者は、1828年にドイツの数学者ガウスが解明した「曲げられた紙が、折り目方向に対する曲げ圧力に強くなる原因(ダンボールやギザポテトが丈夫になる理由)」を基礎理論として使用しました。
具体的には、ガウスの理論を元にシートに微分された格子構造としてシミュレートし、屈折によってかかる負担を格子ごとに算出。それぞれの格子で樹脂メッシュの耐久力の限界を超えないように負荷の限界を定めていったのです。
樹脂メッシュの代わりに液体金属を使うこともできる

今回の実験では樹脂メッシュが実験素材として人の顔を形成しましたが、研究チームは導電性の液体金属を共振周波数を使って変形させることにも成功していました。
この制御技術が確立されれば、人形の液体金属を直立二足歩行させることも可能となります。
もしかしたら映画「ターミネーター2」のように、AIによって制御された液体金属に命を狙われる日も近いかもしれません。
reference: arstechnica / written by ナゾロジー編集部

コメント